本項では、平衡状態の熱力学 について解説する。非平衡状態も含めた熱力学の概説は熱力学 の項目を参照されたい。
熱力学において、考察の対象とするマクロな物質を系 (英 : system )という。本節では、熱力学における系の特徴とその記述方法について説明する。
外部から孤立している系を十分長い時間放置しておくとマクロに見て変化がない状態に移行する。この状態を系の熱平衡状態 、あるいは単に平衡状態 (英 : equilibrium state )という。
一方、系が外部から孤立していない場合は、系のみを切り出してそのまま孤立させた状態が上述の意味での平衡状態と同じ状態になっているとき平衡状態 という。
平衡状態の定義において、外部との関係性を明確化するのは単にマクロに変化のない状態(定常状態 )との違いをはっきりさせるためである。たとえば抵抗に電池を繋いで放置すれば、マクロには変化がない定常状態になるが、外部から孤立していない(し、系を切りだした状態が孤立した状態と同一にはならない)ため、この状態を平衡状態とはみなさない。
なお上では平衡状態を定義する際「孤立している」としたが、系に静的な外場 がかかっている場合も許容する。
2つの系Γ 、Δ を接触させて熱のやりとり(熱接触 )をして平衡に達したら、Γ とΔ は熱平衡 にあると言うことにする。以下の性質を熱力学の第0法則 という。
性質 (熱力学の第0法則 (英 : the zeroth law of thermodynamics )) ― 系Γ と系Δ が熱平衡にあり、しかも系Δ と系Θ が熱平衡にあると、系Γ と系Θ は熱平衡にある。
具体的には例えば液体がガラスの容器に入れられているとき、空気(系Γ )とガラス(系Δ )が熱平衡に達し、ガラスと液体(系Θ )も熱平衡に達したとき、空気と液体も熱平衡にあるとするものである。
なお、上では「熱平衡」という概念で熱力学の第0法則を定式化したが、代わりに「温度」という概念で第0法則を定式化するものもある。
熱力学の第0法則により、系Γ と系Δ を介する事により、系Θ に直接接する事なく系Θ について知れる。こうした事から、(金川哲也 2021 , p. 23)は熱力学の第0法則は「熱力学の大前提」となる法則であるとしている[ 注 1]
外界から孤立しており外部と熱、仕事、物質等のやりとりが発生しない系を孤立系 という。なお、熱力学では孤立系以外の系を考える事もある。(例えば熱浴 と接していて常に一定の温度に保たれている系など)。
系を閉じ込めている容器が内部で壁で区切られているなどしているものを複合系 (合成系 、複合状態 とも)、そうでないものを単純系 (単純状態 とも)という
壁には容器に固定されていて動かないものや自由に動くもの(不動壁 /可動壁 )もある。また熱を通すものや通さないもの(透熱壁 /断熱壁 )、物質も通すもの(断物壁 )や通さないものなど様々である。
なお、単純系には外力や磁場 などの外場はかかっていても良いが、これらが原因となって系に生じる空間的不均一が無視できるほど小さい事を仮定する[ 注 2] 場 も通さない壁を完全な壁 [ 注 3]
与えられた系Γ を空間的に分割したとき、分割した各々をΓ の部分系 (英 : sub-system )という
熱力学的な系Γ が与えられたとき、Γ の熱力学的な平衡状態 全体の集合を熱力学的状態空間 (英 : thermodynamic state space )あるいは単に状態空間 (英 : state space )という。紛れがなければ以下、系Γ の状態空間の事もΓ と表記する[ 注 4]
熱力学では物質を入れている容器の形状や(容器の中に複数の相 があるときの)相の空間的配置が違うだけの系は同一視する。これらの違いが系の熱力学的な性質に影響を与えないからである。
この結果、系の熱力学的な性質の記述に必須となる物理量の数は限定的になり、各平衡状態は内部エネルギー U 体積 V 物質量 N 、(磁場を考えている場合は)全磁化
M
{\displaystyle \mathbf {M} }
[ 注 5] [ 注 6]
これは数学的には状態集合Γ を
R
n
=
{
(
U
,
V
,
N
,
⋯
)
}
{\displaystyle \mathbb {R} ^{n}=\{(U,V,N,\cdots )\}}
[ 注 7]
なお上では単純系を想定して記述する変数を
(
U
,
V
,
N
,
⋯
)
{\displaystyle (U,V,N,\cdots )}
(
U
1
,
V
1
,
N
1
,
⋯
)
{\displaystyle (U_{1},V_{1},N_{1},\cdots )}
(
U
2
,
V
2
,
N
2
,
⋯
)
{\displaystyle (U_{2},V_{2},N_{2},\cdots )}
Γ をどの物理量で記述するのかは任意性があり、Γ を上述したU 、V N で記述する事をUVN 表示S 、体積V 、N で記述するSVN 表示T 、体積V 、N で記述するTVN 表示Γ を多様体 とみなし、その局所座標としてどの変数を用いるかに相当する。
数学的には壁は系の平衡状態を記述する変数の束縛条件(内部束縛 、英 : internal constraint
V
{\displaystyle V}
UVN 表示で)左側が平衡状態
A
1
=
(
U
1
,
V
1
,
N
1
,
…
)
{\displaystyle A_{1}=(U_{1},V_{1},N_{1},\ldots )}
A
2
=
(
U
2
,
V
2
,
N
2
,
…
)
{\displaystyle A_{2}=(U_{2},V_{2},N_{2},\ldots )}
条件
C
{\displaystyle C}
V
1
=
c
o
n
s
t
{\displaystyle V_{1}=\mathrm {const} }
条件
C
′
{\displaystyle C'}
V
2
=
V
−
V
1
{\displaystyle V_{2}=V-V_{1}}
という2つの内部束縛が課されるし、壁が左右に動けるようになっているときは
条件
C
′
{\displaystyle C'}
V
2
=
V
−
V
1
{\displaystyle V_{2}=V-V_{1}}
のみが課される。
内部束縛を課すという事は、数学的には部分空間を考える事を意味する。すなわち壁の左側の系を
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
Γ
1
×
Γ
2
{\displaystyle \Gamma _{1}\times \Gamma _{2}}
Λ
=
{
(
A
1
,
A
2
)
∈
Γ
1
×
Γ
2
∣
(
A
1
,
A
2
)
{\displaystyle \Lambda =\{(A_{1},A_{2})\in \Gamma _{1}\times \Gamma _{2}\mid (A_{1},A_{2})}
C
{\displaystyle C}
C
′
{\displaystyle C'}
}
{\displaystyle \}}
となる[ 注 8]
系を入れる容器にピストン がついていればそれを押したり引いたりする事で体積を変えたりできるし、系をなんらかの熱源 と接触させれば系を温めたり冷やしたりできる。このように系にマクロな働きかけをする事を系への操作 (英 : operation )と呼ぶ。
容器への壁の挿入や取り出し、留め金を締めたり開けたりして壁の固定したり自由に動かしたりする作業も系への操作である。ピストンや壁など操作に用いる道具を理想化して考え、これらの道具の質量、摩擦、仕事 は無視できるものとする
平衡状態A にある系に何らかの操作を加えたあと放置すると、系は(一般にはA とは別の)平衡状態B に落ち着く。この事を操作により系の平衡状態がA からB に遷移 (英 : transition )したという
このように熱力学では平衡状態から別の平衡状態への遷移を考えるが、遷移の途中は平衡状態でなくともよく 、最終的にどの平衡状態に落ち着いたのかだけが重要になるΓ は平衡状態の空間なので、遷移の途中は必ずしもΓ の元としてはかけない。
系がある平衡状態から別の平衡状態へと遷移する道筋を過程 (英 : process )と呼ぶ[ 注 9]
定義 (準静的過程 ) ―
系が常に平衡状態にあるとみなせる過程を準静的過程 (英 : quasistatic process )という
[ 注 10]
例えばピストンを動かすとき、ピストンを速く動かしてしまうと(系を構成する物質が気体や液体であれば)系の中に密度の差や物質の複雑な流れが生じて非平衡な状態になってしまうが、ピストンを「十分ゆっくり」[ 注 11]
準静的過程はこれを理想化したものであり、系を変化させる速度が無限に小さい場合の極限(理想極限 )に相当する。
平衡状態A から平衡状態B への
準静的過程を考えると、この過程では系が変化する最中、常に平衡状態にあるので、変化の軌跡が状態空間上のA からB への曲線として描ける 。
後述するように熱量や仕事量といった熱力学で登場する物理量は状態空間上の線積分により定式化されるが、これはすなわち系を準静的過程に従って変化させたときの曲線を積分経路としてこれらの概念が定式化される事を意味しており、これらの定式化は準静的過程以外には適用できない [ 注 12]
本節では、熱力学に登場する物理量の分類について説明する。
熱力学では系の圧力 P は状態空間の各元(すなわち各平衡状態)に実数を対応させる関数として定式化される:
P
:
Γ
→
R
{\displaystyle P~:~\Gamma \to \mathbb {R} }
このように
Γ
{\displaystyle \Gamma }
状態関数 [ 41] [ 42] 英 : state function [ 41] 状態量 英 : state quantity [ 41] P 以外に温度T 、体積 V 物質量 N 、および後述する内部エネルギー U 、エントロピーS 、化学ポテンシャルμ といったものがある。
D を可微分な状態量とすると、D の全微分 を用いて
D
(
A
)
=
∫
A
0
A
d
D
+
c
o
n
s
t
{\displaystyle D(A)=\int _{A_{0}}^{A}\mathrm {d} D+\mathrm {const} }
のように記述できるので、D が状態量である事は(積分定数と可微分性の仮定とを除いて)完全微分
d
D
{\displaystyle \mathrm {d} D}
d
D
{\displaystyle \mathrm {d} D}
A
0
{\displaystyle A_{0}}
A
{\displaystyle A}
一方、同じ熱力学に登場する物理量でも、熱量Q や仕事W は状態量ではなく、不完全微分 の線積分として定式化される(詳細後述)。一般にこのような線積分により定義される物理量D に対し、D を定義するのに用いた不完全微分を「
d
′
D
{\displaystyle \mathrm {d} 'D}
[ 注 13] Q は
Q
=
∫
γ
d
′
Q
{\displaystyle Q=\int _{\gamma }\mathrm {d} 'Q}
のように記述できる[ 注 14]
d
′
Q
{\displaystyle \mathrm {d} 'Q}
Q の値は積分経路
γ
{\displaystyle \gamma }
Q は
Γ
{\displaystyle \Gamma }
Q
:
γ
↦
R
{\displaystyle Q~:~\gamma \mapsto \mathbb {R} }
として定式化される。
このように
Γ
{\displaystyle \Gamma }
経路関数 [ 42] Q や仕事W のように、不完全微分の線積分により経路関数として定式化される物理量を非状態量 [ 46]
系
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
Γ
0
{\displaystyle \Gamma _{0}}
Γ
0
{\displaystyle \Gamma _{0}}
Γ
1
{\displaystyle \Gamma _{1}}
A
{\displaystyle A}
Γ
2
{\displaystyle \Gamma _{2}}
B
{\displaystyle B}
(
A
,
B
)
{\displaystyle (A,B)}
相加変数の具体例としては系の体積V があり、系
Γ
0
{\displaystyle \Gamma _{0}}
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
N や後述するエントロピーS がある。
系Γ の平衡状態A に対し、A と同じ状態にあるが全体の大きさを
t
>
0
{\displaystyle t>0}
tA と書く[ 注 16]
定義 (示量変数 ) ― D を状態量とする。任意の系Γ 、Γ の任意の平衡状態A 、および任意の実数
t
>
0
{\displaystyle t>0}
D を示量変数 (英 : extensive variable )という[ 注 17]
D
(
t
A
)
=
t
D
(
A
)
{\displaystyle D(tA)=tD(A)}
D が相加変数であれば、任意の有理数に対して
D
(
t
A
)
=
t
D
(
A
)
{\displaystyle D(tA)=tD(A)}
[ 注 18] D の連続性を仮定すれば、相加変数は必ず示量変数になる。
こうした理由から、熱力学の範囲では相加変数と示量変数は区別する必要がない事が知られている。したがって以下本項でも両者を区別しない。
示強変数とは、示量変数と違い、tA とA で値が変わらない状態量の事である[ 注 19]
定義 (示強変数 ) ― D を状態量とする。任意の系Γ 、Γ の任意の平衡状態A 、および任意の実数
t
>
0
{\displaystyle t>0}
D を示強変数 (英 : intensive variable )という
D
(
t
A
)
=
D
(
A
)
{\displaystyle D(tA)=D(A)}
示強変数の単純な例として、示量変数を体積で割ったものがある。例えば後述するエントロピー
S
(
A
)
{\displaystyle S(A)}
V
(
A
)
{\displaystyle V(A)}
エントロピー密度
s
(
A
)
{\displaystyle s(A)}
別の例として示量変数の示量変数による偏微分も示強変数になる。例えば内部エネルギーのエントロピー、体積、物質量による偏微分
∂
U
∂
S
{\displaystyle {\tfrac {\partial U}{\partial S}}}
∂
U
∂
V
{\displaystyle {\tfrac {\partial U}{\partial V}}}
∂
U
∂
N
{\displaystyle {\tfrac {\partial U}{\partial N}}}
熱力学において本質的なのは、こうした偏微分の形で表される示強変数なので、これらを狭義示強変数 (英 : intensive variable in a narrow sense )という。(清水明 2021a )では単に「示強変数」と呼んだ場合は「狭義示強変数」を意味するとしている。
系がマクロには静止しているように見えても、系を構成するミクロな粒子は粒子の運動による運動エネルギーや粒子間に働く電磁力によるポテンシャルエネルギーを保有している。こうしたミクロな粒子の持つエネルギーの総和を内部エネルギー
U
{\displaystyle U}
平衡状態A にある系Γ が、系の外部と相互作用して平衡状態B に遷移した状況を考え、
Δ
U
=
{\displaystyle \Delta U=}
−
{\displaystyle -}
とすると、(外場がない状況では[ 注 20]
Δ
U
{\displaystyle \Delta U}
B の内部エネルギー
U
B
{\displaystyle U_{B}}
A の内部エネルギー
U
A
{\displaystyle U_{A}}
Δ
U
=
U
B
−
U
A
{\displaystyle \Delta U=U_{B}-U_{A}}
に一致する。さらに
W
=
{\displaystyle W=}
−
{\displaystyle -}
として[ 注 21]
Δ
U
{\displaystyle \Delta U}
Q
=
Δ
U
−
W
{\displaystyle Q=\Delta U-W}
と定義すると、Q はマクロには捉えられないミクロなエネルギーの移動を表している事になる。Q を外部から系に流れ込んできた熱 英 : heat )または熱量 という。
上記の事実を熱力学の第一法則という[ 注 22]
性質 (熱力学の第一法則 ―
Δ
U
=
W
+
Q
{\displaystyle \Delta U=W+Q}
仕事と熱はいずれもエネルギーの移動 を表す物理量であり、両者を区別するのは移動の「仕方」である。
歴史的には熱は「熱素 」という粒子の量だと考えられていたが、今日ではこの仮説は否定されており、上記のように熱の概念を再解釈している。こうした歴史的経緯から、日常語の「熱」は上述の定義の枠からはみ出たものもあり、例えば「熱を持った物体」という言い方はエネルギーの移動を表していないので、上述の定義に当てはまらない。
平衡状態A から平衡状態B に遷移する過程が準静的過程の場合、遷移する過程は状態空間上のA からB への曲線として表す事ができる ので、この曲線を
γ
{\displaystyle \gamma }
力学的仕事
W
M
{\displaystyle W_{M}}
P と体積V を用いて
W
M
=
−
∫
γ
P
d
V
{\displaystyle W_{M}=-\int _{\gamma }P\mathrm {d} V}
と表記できる。すなわち、
W
M
{\displaystyle W_{M}}
d
′
W
M
=
−
P
d
V
{\displaystyle \mathrm {d} 'W_{M}=-P\mathrm {d} V}
のように不完全微分で表記できる。なお、マイナスがついているのは仕事は系が外部から受けるのを正にしたのに対し、圧力は逆に系から外部へと向かう向きを正としているからである[ 注 23]
後述するように力学的ではない仕事も不完全微分で表記できる事が知られているので、系の遷移に伴う仕事
W
{\displaystyle W}
d
′
W
{\displaystyle \mathrm {d} 'W}
U
{\displaystyle U}
d
U
{\displaystyle \mathrm {d} U}
以上のことから熱力学の第一法則より、熱量
Q
{\displaystyle Q}
[ 注 24]
性質 (熱力学の第一法則の微分形) ―
d
U
=
d
′
W
+
d
′
Q
{\displaystyle \mathrm {d} U=\mathrm {d} 'W+\mathrm {d} 'Q}
U の相加性本節では
U
{\displaystyle U}
Γ
{\displaystyle \Gamma }
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
A
1
{\displaystyle A_{1}}
A
2
{\displaystyle A_{2}}
Γ
{\displaystyle \Gamma }
U
{\displaystyle U}
U
=
U
1
+
U
2
+
U
12
{\displaystyle U=U_{1}+U_{2}+U_{12}}
のように部分系
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
U
1
{\displaystyle U_{1}}
U
2
{\displaystyle U_{2}}
U
12
{\displaystyle U_{12}}
U
12
{\displaystyle U_{12}}
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
このうち重力は他の2つより遥かに小さいので無視でき、クーロン力によるエネルギーは正負の電化が釣り合っていれば小さく、双極子や磁気モーメントも粒子間で向きが揃っていなければ小さいため、このようなケースでは
U
12
≈
0
{\displaystyle U_{12}\approx 0}
U
≈
U
1
+
U
2
{\displaystyle U\approx U_{1}+U_{2}}
となり
U
{\displaystyle U}
しかし系
Γ
{\displaystyle \Gamma }
強磁性体 である場合は磁気モーメントの向きが揃っているため
U
12
{\displaystyle U_{12}}
U
{\displaystyle U}
相加変数にならない 。
本項では、特に断りがない限りこのようなケースは扱わず、以下、
U
{\displaystyle U}
エントロピー は断熱過程 の不可逆性 を特徴付ける状態量であり、熱力学において基本的な役割を果たす。しかし状態量が実際に存在する事を示すのは容易ではないため、多くの教科書と同様、まずは上述の性質を満たす状態量が存在する事を認めたうえで議論を進め、次にエントロピーとそれ以外の状態量との関係について述べ、最後にエントロピーの存在について説明する。
具体的にはエントロピーの以下の性質について述べる:
示量変数である事
エントロピー原理
エントロピー最大の原理 これらのうち、「示量変数」とは何かの説明は前述したので、本章では残りの2つについて述べる。
なお、本項ではあくまで(平衡状態に対する)熱力学のエントロピーを解説する。統計力学などそれ以外の分野におけるエントロピーはエントロピー の項目を参照されたい。
エントロピーは熱力学的な系の各平衡状態 A に対して非負の実数
S
(
A
)
{\displaystyle S(A)}
状態量 [ 注 25]
性質 (エントロピー原理 [ 注 28] ― 系の2つの平衡状態A 、B に対し、A からB に断熱的に遷移 [ 注 26]
S
(
A
)
≤
S
(
B
)
{\displaystyle S(A)\leq S(B)}
[ 注 27]
すなわち、系の平衡状態A からB に断熱的に遷移できるときに「
A
≺
B
{\displaystyle A\prec B}
A
≺
B
⟺
S
(
A
)
≤
S
(
B
)
{\displaystyle A\prec B\iff S(A)\leq S(B)}
が成立するという事である。
上記の性質から特に、
S
(
A
)
=
S
(
B
)
{\displaystyle S(A)=S(B)}
A からB にも断熱的に遷移でき、逆にB からA にも遷移できる事になるが、これは準静的過程で遷移させる事で実現できる:
性質 ― 準静的な断熱過程で系のエントロピーは変化しない。また内部制約が課せられていない[ 注 29] A 、B が
S
(
A
)
=
S
(
B
)
{\displaystyle S(A)=S(B)}
A からB に準静的な断熱過程で遷移できる。
断熱的な遷移過程が、逆向きにも断熱的にたどれるとき、その過程は可逆過程 (英 : reversible process )であるという。上述した事から、可逆過程はエントロピーを変化させない準静的過程と一致する。
エントロピー原理において
S
(
A
)
=
S
(
B
)
{\displaystyle S(A)=S(B)}
A からB に遷移するには準静的に行う必要があり、これはあくまで理想化された過程なので無視すると、以下のエントロピー増大の法則 がエントロピー原理から従う:
性質 (エントロピー増大の法則 ) ― 断熱[ 注 30]
なお、断熱されていない系の場合はエントロピーを減少させる事も可能である[ 注 31]
エントロピー増大則に対していくつか注釈を述べる。第一に、熱力学においてエントロピーは平衡状態に対して定義された量であり、したがって(少なくとも通常の熱力学におけるエントロピー概念を用いている限りは)エントロピー増大則も平衡状態以外に対しては意味を持たない。
ただし、平衡状態から別の平衡状態へ遷移する過程は非平衡でもよいので、断熱された系が、平衡状態→非平衡な遷移→平衡状態、と移り変わった場合にはエントロピー増大の法則を適用できる。
第二に(清水明 2021a )は上述したエントロピー増大則の「様々な操作」の部分に対して、より慎重な姿勢を見せている。(清水明 2021a )では外部からの操作が「どの相加変数の値も直接には変えないよう内部束縛をオン・オフすることだけ」の場合に対してのみ、エントロピー増大則を記述している。このような内部束縛のオン・オフとしては例えば「(系に対して無視できるほどの大きさの)留め金で固定された壁の留め金を外す」といった操作がある。
第三に、エントロピー増大則を宇宙全体に適用して、宇宙全体が遠い将来エントロピー最大の平衡状態である「熱的死 」を迎えるとする説もあるが、(田崎晴明 2000 , p. 112)によれば、過去に一度も平衡状態に達していない系である宇宙にこの法則を適用するのは危険である。田崎は「われわれが生きている世界が本質的に非平衡系であることを考えると、エントロピー増大則を軽々しく現実世界に適用する事はできない」としている。
また地球全体にこの法則を適用して生命が進化した事がこの法則の反例であるかのような記述が通俗書で見受けられるが、地球は外部から断熱されておらず、この法則は適用できないので、(田崎晴明 2000 , p. 112)によれば、こうした記述は「初歩的な知識不足からくる誤りにすぎない」。
ある複合系
Γ
{\displaystyle \Gamma }
C
1
,
C
2
,
…
,
C
m
{\displaystyle C_{1},C_{2},\ldots ,C_{m}}
C
′
{\displaystyle C'}
C
′
{\displaystyle C'}
A
{\displaystyle A}
A
{\displaystyle A}
性質 (エントロピー最大の原理 ) ― 内部束縛条件
C
1
,
C
2
,
…
,
C
m
{\displaystyle C_{1},C_{2},\ldots ,C_{m}}
C
′
{\displaystyle C'}
Γ
{\displaystyle \Gamma }
C
′
{\displaystyle C'}
max
{
S
(
A
)
|
A
∈
Γ
{\displaystyle \max\{S(A)|A\in \Gamma }
A
{\displaystyle A}
C
1
,
C
2
,
…
,
C
m
{\displaystyle C_{1},C_{2},\ldots ,C_{m}}
}
{\displaystyle \}}
を達成する平衡状態
A
{\displaystyle A}
[ 注 32]
複合系
Γ
{\displaystyle \Gamma }
Γ
1
,
…
,
Γ
k
{\displaystyle \Gamma _{1},\ldots ,\Gamma _{k}}
Γ
i
{\displaystyle \Gamma _{i}}
S
i
{\displaystyle S_{i}}
max
{
∑
i
S
(
A
i
)
|
A
=
(
A
1
,
…
,
A
k
)
∈
Γ
1
×
⋯
×
Γ
k
{\displaystyle \max\{\sum _{i}S(A_{i})|A=(A_{1},\ldots ,A_{k})\in \Gamma _{1}\times \cdots \times \Gamma _{k}}
A
{\displaystyle A}
C
1
,
C
2
,
…
,
C
m
{\displaystyle C_{1},C_{2},\ldots ,C_{m}}
}
{\displaystyle \}}
を最大化する
A
=
(
A
1
,
…
,
A
k
)
{\displaystyle A=(A_{1},\ldots ,A_{k})}
[ 注 33]
A
{\displaystyle A}
A
{\displaystyle A}
A
′
{\displaystyle A'}
S
0
=
S
(
A
)
=
S
(
A
′
)
{\displaystyle S_{0}=S(A)=S(A')}
A
{\displaystyle A}
A
′
{\displaystyle A'}
[ 注 34]
第二に、後述するようにエントロピー関数
S
{\displaystyle S}
S
{\displaystyle S}
第三に、エントロピー最大の原理を使えば、壁のある系から壁を取り去った後どの平衡状態が達成されるのかを決定できるが、壁の右側と左側で異なる物質 が入っている場合は注意が必要である。なぜなら、壁の右側に物質
B
{\displaystyle {\mathcal {B}}}
C
{\displaystyle {\mathcal {C}}}
SVN 表示)
S
B
(
U
,
V
,
N
B
)
{\displaystyle S_{\mathcal {B}}(U,V,N_{\mathcal {B}})}
S
C
(
U
,
V
,
N
C
)
{\displaystyle S_{\mathcal {C}}(U,V,N_{\mathcal {C}})}
S
(
U
,
V
,
N
B
,
N
C
)
{\displaystyle S(U,V,N_{\mathcal {B}},N_{\mathcal {C}})}
S
{\displaystyle S}
S
B
{\displaystyle S_{\mathcal {B}}}
S
C
{\displaystyle S_{\mathcal {C}}}
前述したように熱力学では状態空間の各平衡状態は有限個の状態量で記述できるが、平衡状態を内部エネルギーU や体積V で記述するのか、それとも圧力P や温度T で記述するのかといった、記述に用いる状態量には選択肢がある(これらの状態量は変数として独立ではないから)。どの変数で系の平衡状態を記述するかにより、エントロピーの変数が
S
(
U
,
V
,
…
)
{\displaystyle S(U,V,\ldots )}
S
(
P
,
T
,
…
)
{\displaystyle S(P,T,\ldots )}
しかしエントロピーの場合は、下記のような状態量で系の平衡状態を記述することが後述する「完全な熱力学関数」であるという事実を導くうえで必須である:
内部エネルギー自身も示量変数である。
X
{\displaystyle \mathbf {X} }
系を閉じ込めている容器の体積
V
{\displaystyle V}
容器に閉じ込められている物質の物質量
N
{\displaystyle N}
相 が閉じ込められている場合は各物質・相の物質量を並べた
N
1
,
N
2
,
…
{\displaystyle N_{1},N_{2},\ldots }
(磁場を考えている場合は)全磁化
M
{\displaystyle \mathbf {M} }
[ 注 36] これらはすべて独立変数である。上記のように
U
{\displaystyle U}
V
{\displaystyle V}
N
{\displaystyle N}
…
{\displaystyle \ldots }
UVN 表示
次の事実が知られている:
性質 ― 自然な変数で記述されている単純系のエントロピー
S
=
S
(
U
,
X
)
{\displaystyle S=S(U,\mathbf {X} )}
[ 注 37]
エントロピー関数は以下を満たす:
実際、平衡状態
t
A
1
=
(
t
U
1
,
t
X
1
)
{\displaystyle tA_{1}=(tU_{1},t\mathbf {X} _{1})}
(
1
−
t
)
A
2
=
(
(
1
−
t
)
U
2
,
(
1
−
t
)
X
2
)
{\displaystyle (1-t)A_{2}=((1-t)U_{2},(1-t)\mathbf {X} _{2})}
t
A
1
|
(
1
−
t
)
A
2
{\displaystyle tA_{1}|(1-t)A_{2}}
t
A
1
+
(
1
−
t
)
A
2
{\displaystyle tA_{1}+(1-t)A_{2}}
[ 注 39]
S
(
t
A
1
+
(
1
−
t
)
A
2
)
≥
S
(
t
A
1
|
(
1
−
t
)
A
2
)
{\displaystyle S(tA_{1}+(1-t)A_{2})\geq S(tA_{1}|(1-t)A_{2})}
=
S
(
t
A
1
)
+
S
(
(
1
−
t
)
A
2
)
=
t
S
(
A
1
)
+
(
1
−
t
)
S
(
A
2
)
{\displaystyle =S(tA_{1})+S((1-t)A_{2})=tS(A_{1})+(1-t)S(A_{2})}
が成立する。ここで1つ目、2つ目、3つ目の不等号はそれぞれエントロピー増大の法則、さらにエントロピーの加法性 、および示量性 から従う。
上では単純系に関するエントロピーの凸性について述べたが、複合系の場合はより複雑である。複合系を構成する各単純系がどれも系としては同一であり(すなわち、量が違うだけで同一の物質からなる系であり)、しかも個々の単純系の間を仕切る壁が完全な壁であれば、やはり凸性が成り立つ:
性質 ― 系としては同一な複数の単純系からなる複合系で、個々の単純系の間が完全な壁で区切られている複合系におけるエントロピーは(自然な変数で表されていれば)上に凸である。
実際、系としては同一という条件からエントロピーの加法性が使えるので、完全な壁で区切った
A
(
1
)
|
A
(
2
)
{\displaystyle A^{(1)}|A^{(2)}}
S
(
A
(
1
)
|
A
(
2
)
)
{\displaystyle S(A^{(1)}|A^{(2)})}
=
S
(
A
(
1
)
)
+
S
(
A
(
2
)
)
{\displaystyle =S(A^{(1)})+S(A^{(2)})}
一方、系として異なる単純系からなる複合系では*****
[ 注 40]
V
(
1
)
+
V
(
2
)
=
V
{\displaystyle V^{(1)}+V^{(2)}=V}
一次式 でかけている事が多く、凸関数を一次式で書ける部分空間に制約したものは凸関数なので、この場合には凸関数である事が保証される。
「熱力学的な系の平衡状態の性質と、種々の操作による平衡状態の移り変わりについての完全な情報を持って」いる関数を完全な熱力学的関数 と呼ぶが、自然な変数で記述されたエントロピー関数
S
(
U
,
X
)
{\displaystyle S(U,\mathbf {X} )}
S
(
U
,
X
)
{\displaystyle S(U,\mathbf {X} )}
S
(
U
,
V
,
N
1
,
N
2
,
…
)
{\displaystyle S(U,V,N_{1},N_{2},\ldots )}
U に関して解いた
U
=
U
(
S
,
V
,
N
1
,
N
2
,
…
)
{\displaystyle U=U(S,V,N_{1},N_{2},\ldots )}
を用いて温度や圧力といった状態量を記述し、次に
S
(
U
,
V
,
N
1
,
N
2
,
…
)
{\displaystyle S(U,V,N_{1},N_{2},\ldots )}
S をU に関して解く事が可能である:
性質 ― 単純系のエントロピーを自然な変数で表示した
S
=
S
(
U
,
V
,
N
1
,
N
2
,
…
)
{\displaystyle S=S(U,V,N_{1},N_{2},\ldots )}
(
U
,
V
,
N
1
,
N
2
,
…
)
{\displaystyle (U,V,N_{1},N_{2},\ldots )}
∂
S
∂
U
(
U
,
V
,
N
1
,
N
2
,
…
)
>
0
{\displaystyle {\partial S \over \partial U}(U,V,N_{1},N_{2},\ldots )>0}
U
=
U
(
S
,
V
,
N
1
,
N
2
,
…
)
{\displaystyle U=U(S,V,N_{1},N_{2},\ldots )}
T 、圧力P 、化学ポテンシャル
μ
i
{\displaystyle \mu _{i}}
[ 注 41]
N
=
(
N
1
,
N
2
,
…
)
{\displaystyle N=(N_{1},N_{2},\ldots )}
T
=
(
∂
U
∂
S
)
V
,
N
{\displaystyle T=\left({\partial U \over \partial S}\right)_{V,N}}
P
=
−
(
∂
U
∂
V
)
S
,
N
{\displaystyle P=-\left({\partial U \over \partial V}\right)_{S,N}}
μ
i
=
(
∂
U
∂
N
i
)
S
,
V
,
(
N
j
)
j
≠
i
{\displaystyle \mu _{i}=\left({\partial U \over \partial N_{i}}\right)_{S,V,(N_{j})_{j\neq i}}}
これは(全磁化を考慮しないケースに対する)U の全微分
d
U
=
∂
U
∂
S
d
S
+
∂
U
∂
V
d
V
+
∑
i
∂
U
∂
N
i
d
N
i
{\displaystyle \textstyle \mathrm {d} U={\tfrac {\partial U}{\partial S}}\mathrm {d} S+{\tfrac {\partial U}{\partial V}}\mathrm {d} V+\sum _{i}{\tfrac {\partial U}{\partial N_{i}}}\mathrm {d} N_{i}}
d
U
=
T
d
S
−
P
d
V
+
∑
i
μ
i
d
N
i
{\displaystyle \mathrm {d} U=T\mathrm {d} S-P\mathrm {d} V+\sum _{i}\mu _{i}\mathrm {d} N_{i}}
Eq. 1 )
S
(
U
,
V
,
N
1
,
N
2
,
…
)
{\displaystyle S(U,V,N_{1},N_{2},\ldots )}
U
(
S
,
V
,
N
1
,
N
2
,
…
)
{\displaystyle U(S,V,N_{1},N_{2},\ldots )}
1
T
=
(
∂
S
∂
U
)
V
,
N
{\displaystyle {1 \over T}=\left({\partial S \over \partial U}\right)_{V,N}}
P
T
=
−
(
∂
S
∂
V
)
U
,
N
{\displaystyle {P \over T}=-\left({\partial S \over \partial V}\right)_{U,N}}
μ
i
T
=
(
∂
S
∂
N
i
)
U
,
V
,
(
N
j
)
j
≠
i
{\displaystyle {\mu _{i} \over T}=\left({\partial S \over \partial N_{i}}\right)_{U,V,(N_{j})_{j\neq i}}}
これらは(Eq. 1
d
S
{\displaystyle \mathrm {d} S}
d
U
{\displaystyle \mathrm {d} U}
d
V
{\displaystyle \mathrm {d} V}
d
N
i
{\displaystyle \mathrm {d} N_{i}}
なお、全磁化
M
=
(
M
x
,
M
y
,
M
z
)
{\displaystyle \mathbf {M} =(M_{x},M_{y},M_{z})}
S
{\displaystyle S}
U
{\displaystyle U}
α
=
x
,
y
,
z
{\displaystyle \alpha =x,y,z}
[ 注 42]
H
α
=
(
∂
U
∂
M
α
)
S
,
V
,
N
,
(
M
β
)
β
≠
α
{\displaystyle H_{\alpha }=\left({\partial U \over \partial M_{\alpha }}\right)_{S,V,N,(M_{\beta })_{\beta \neq \alpha }}}
ここで
H
=
(
H
x
,
H
y
,
H
z
)
{\displaystyle \mathbf {H} =(H_{x},H_{y},H_{z})}
H
α
T
=
(
∂
S
∂
M
α
)
U
,
V
,
N
,
(
M
β
)
β
≠
α
{\displaystyle {H_{\alpha } \over T}=\left({\partial S \over \partial M_{\alpha }}\right)_{U,V,N,(M_{\beta })_{\beta \neq \alpha }}}
S
(
U
,
V
,
N
1
,
N
2
,
…
)
{\displaystyle S(U,V,N_{1},N_{2},\ldots )}
U
(
S
,
V
,
N
1
,
N
2
,
…
)
{\displaystyle U(S,V,N_{1},N_{2},\ldots )}
ルジャンドル変換 する事により、自由エネルギー やエンタルピー といった他の完全な熱力学関数を求めることもできる。詳細は熱力学ポテンシャル の項目を参照されたい。
前述した微分形の関係式(Eq. 1
U
=
∫
d
U
=
∫
T
d
S
−
∫
P
d
V
+
∫
∑
i
μ
i
d
N
i
{\displaystyle \textstyle U=\int \mathrm {d} U=\int T\mathrm {d} S-\int P\mathrm {d} V+\int \sum _{i}\mu _{i}\mathrm {d} N_{i}}
[ 注 43]
この事実を内部エネルギーU 、熱量Q 、および仕事W の関係を示した熱力学の第一法則
d
U
=
d
′
Q
+
d
′
W
{\displaystyle \mathrm {d} U=\mathrm {d} 'Q+\mathrm {d} 'W}
と比較する事で、次の結論を得る:
d
′
Q
=
T
d
S
{\displaystyle \mathrm {d} 'Q=T\mathrm {d} S}
ここで「
d
′
{\displaystyle \mathrm {d} '}
不完全微分 を表す。
d
′
Q
{\displaystyle \mathrm {d} 'Q}
Q
{\displaystyle Q}
d
′
Q
{\displaystyle \mathrm {d} 'Q}
T で割った
d
S
=
d
′
Q
/
T
{\displaystyle dS=\mathrm {d} 'Q/T}
S
=
∫
d
′
Q
T
{\displaystyle \textstyle S=\int {\tfrac {d'Q}{T}}}
エリオット・リーブ とヤコブ・イングヴァソン は、エントロピーの基本的性質として以下の3つを挙げた:
そして彼らは各々の系Γ に対し、Γ における熱力学的な平衡状態全体の集合(状態空間 )に断熱的に遷移できるか否か で順序関係[ 注 46] 公理 を入れて次の事実を数学的に導いた:
上記の定理ではエントロピーの選び方には定数
c
Γ
,
d
Γ
{\displaystyle c_{\Gamma },d_{\Gamma }}
∂
S
∂
U
=
1
T
{\displaystyle {\tfrac {\partial S}{\partial U}}={\tfrac {1}{T}}}
U の単位である「J 」と温度
T
{\displaystyle T}
K 」から定数
c
Γ
{\displaystyle c_{\Gamma }}
d
Γ
{\displaystyle d_{\Gamma }}
A を
S
(
A
)
=
0
{\displaystyle S(A)=0}
絶対零度 でエントロピーが0 になるとする熱力学の第三法則
d
Γ
{\displaystyle d_{\Gamma }}
さらに次を示した:
定理 ― 単純系の場合、エントロピー
S
{\displaystyle S}
状態空間上でエントロピーをはじめとした熱力学的関数 が(エントロピーの自然な変数(後述)に対して)不連続であったりk 回微分可能でなかったりする箇所は物理的には相転移
これまで純粋に数学的な議論のみをしてきたが、以降は物理的な議論も含める。
熱エントロピーの説明用の図。 この節の
加筆 が望まれています。
(2025年3月 )
この節の
加筆 が望まれています。
(2025年3月 )
上ではリーブとイングヴァソンによる数学的な導出を見たが、より物理的な考察によりエントロピーを導出する手法として以下のものがある:
なお教科書によっては、
最初にエントロピーの存在と完全な熱力学関数 としてのエントロピーが満たすべき性質を認め、熱力学を出発させる というスタイルで記述されているものもある。
以下のエントロピーの説明は、クラウジウスが1865年 の論文の中で行ったものを基にしている。クラウジウスは熱 を用いてエントロピーを定義した。この方法による説明は多くの文献で採用されている。
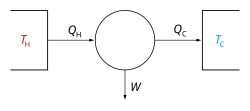
熱機関(中央の円)。温度
T
H
{\displaystyle T_{H}}
Q
H
{\displaystyle Q_{H}}
T
C
{\displaystyle T_{C}}
Q
C
{\displaystyle Q_{C}}
温度 T 1 Q 1 熱 を得て、温度 T 2 Q 2 熱機関 (サイクル)を考える。この熱機関が外部に行う仕事 はエネルギー保存則 から W = Q 1 − Q 2 熱効率 η は
η
=
W
Q
1
=
1
−
Q
2
Q
1
{\displaystyle \eta ={\frac {W}{Q_{1}}}=1-{\frac {Q_{2}}{Q_{1}}}}
で与えられる。
カルノーの定理 によれば、熱機関の熱効率には二つの熱源の温度によって決まる上限の存在が導かれ、その上限は
η
≤
η
m
a
x
=
1
−
T
2
T
1
{\displaystyle \eta \leq \eta _{\mathrm {max} }=1-{\frac {T_{2}}{T_{1}}}}
で表される[ 注 47]
Q
1
T
1
≤
Q
2
T
2
{\displaystyle {\frac {Q_{1}}{T_{1}}}\leq {\frac {Q_{2}}{T_{2}}}}
(*
)
が成立することが分かる。
可逆な熱機関の熱効率は η max (*) 式
Q
1
T
1
=
Q
2
T
2
{\displaystyle {\frac {Q_{1}}{T_{1}}}={\frac {Q_{2}}{T_{2}}}}
(†
)
が成り立つ。すなわち、可逆な過程で高熱源に接している状態から低熱源に接している状態に変化させたとしても Q /T エントロピー と呼んだ。
可逆でない熱機関は熱効率が η max (*) 式
Q
1
T
1
<
Q
2
T
2
{\displaystyle {\frac {Q_{1}}{T_{1}}}<{\frac {Q_{2}}{T_{2}}}}
が成り立つ。すなわち、可逆でない過程で高熱源で熱を得た後、低熱源でその熱を捨てるとエントロピーは増大する(エントロピー増大則 )。
上では話を簡単にするため、高熱源と低熱源の2つしか熱源がない場合を考えたが、より一般にn 個の熱源がある状況を考えると(*) 式
∑
i
=
1
n
Q
i
T
i
≤
0
{\displaystyle \sum _{i=1}^{n}{\frac {Q_{i}}{T_{i}}}\leq 0}
となる(クラウジウスの不等式 )。ただし上の不等式では(*) 式 Qi は全て温度Ti の熱源から得る 熱であり、熱を捨てる場合は負の値としている。
可逆なサイクルでは等号
∑
i
=
1
n
Q
i
T
i
=
0
{\displaystyle \sum _{i=1}^{n}{\frac {Q_{i}}{T_{i}}}=0}
が成り立ち、この式でn →∞
∮
d
′
Q
T
=
0
{\displaystyle \oint {\frac {d'Q}{T}}=0}
となる[ 注 48] A から状態B へと移る任意の可逆過程C ,C' を考え、−C をC の逆過程とする。このとき、C' と−C を連結させた過程C' −C
∮
C
′
−
C
d
′
Q
T
=
∫
C
′
d
′
Q
T
+
∫
−
C
d
′
Q
T
=
∫
C
′
d
′
Q
T
−
∫
C
d
′
Q
T
=
0
{\displaystyle \oint _{C'-C}{\frac {d'Q}{T}}=\int _{C'}{\frac {d'Q}{T}}+\int _{-C}{\frac {d'Q}{T}}=\int _{C'}{\frac {d'Q}{T}}-\int _{C}{\frac {d'Q}{T}}=0}
∫
C
′
d
′
Q
T
=
∫
C
d
′
Q
T
{\displaystyle \int _{C'}{\frac {d'Q}{T}}=\int _{C}{\frac {d'Q}{T}}}
(**
)
が成り立つ。つまり、この積分の値は始状態と終状態が同じならば可逆過程の選び方によらない。
そこで、適当に基準となる状態O と、そのときの基準値S 0 A におけるエントロピー S (A)
S
(
A
)
=
S
0
+
∫
Γ
(
A
)
d
′
Q
T
{\displaystyle S({\text{A}})=S_{0}+\int _{\Gamma ({\text{A}})}{\frac {d'Q}{T}}}
と定義することができる。ここでΓ(A) は基準状態O から状態A へと変化する可逆な 過程である。(**) 式 Γ(A) の選び方によらない。
基準状態O から状態A へと移る可逆過程Γ(A) と、状態A から状態B へと移るある可逆過程C を連結させた過程Γ(A)+C は基準状態O から状態B へと移る可逆過程である。したがって、
∫
Γ
(
A
)
d
′
Q
T
+
∫
C
d
′
Q
T
=
∫
Γ
(
A
)
+
C
d
′
Q
T
=
∫
Γ
(
B
)
d
′
Q
T
{\displaystyle \int _{\Gamma ({\text{A}})}{\frac {d'Q}{T}}+\int _{C}{\frac {d'Q}{T}}=\int _{\Gamma (A)+C}{\frac {d'Q}{T}}=\int _{\Gamma ({\text{B}})}{\frac {d'Q}{T}}}
あるいは
Δ
S
=
S
(
B
)
−
S
(
A
)
=
∫
C
d
′
Q
T
{\displaystyle \Delta S=S({\text{B}})-S({\text{A}})=\int _{C}{\frac {d'Q}{T}}}
となる。
状態A から状態B へと移る任意の過程X と、同じく状態A から状態B へと移る可逆過程C を考え、−C をC の逆過程とする。このときX と−C を連結させた過程X −C
このサイクルについて、導出 と同様にクラウジウスの不等式から
∮
X
−
C
d
′
Q
T
ex
=
∫
X
d
′
Q
T
ex
+
∫
−
C
d
′
Q
T
ex
=
∫
X
d
′
Q
T
ex
−
∫
C
d
′
Q
T
ex
≤
0
{\displaystyle \oint _{X-C}{\frac {d'Q}{T_{\text{ex}}}}=\int _{X}{\frac {d'Q}{T_{\text{ex}}}}+\int _{-C}{\frac {d'Q}{T_{\text{ex}}}}=\int _{X}{\frac {d'Q}{T_{\text{ex}}}}-\int _{C}{\frac {d'Q}{T_{\text{ex}}}}\leq 0}
∫
X
d
′
Q
T
ex
≤
∫
C
d
′
Q
T
ex
{\displaystyle \int _{X}{\frac {d'Q}{T_{\text{ex}}}}\leq \int _{C}{\frac {d'Q}{T_{\text{ex}}}}}
が導かれる。ここでT ex T とは一致しない。しかし、可逆過程C の間においては、系は常に平衡状態にあるとみなされるから、熱源の温度T ex T に一致する。したがって
∫
X
d
′
Q
T
ex
≤
∫
C
d
′
Q
T
=
Δ
S
{\displaystyle \int _{X}{\frac {d'Q}{T_{\text{ex}}}}\leq \int _{C}{\frac {d'Q}{T}}=\Delta S}
となる。
特に断熱系(外から仕事が加えられても良い)においてはd' Q = 0 なので、
Δ
S
≥
0
{\displaystyle \Delta S\geq 0}
という結果が得られる。これがエントロピー増大則 である。熱力学第二法則 と同値なクラウジウスの不等式からこれが求められたことにより、熱力学第一法則 がエネルギー保存則 と対応するのになぞらえて熱力学第二法則とエントロピー増大則を対応させることもある。なお、この導出から明らかなように、熱の出入りがある系ではエントロピーが減少することも当然起こり得る。
エントロピーが増加するために、熱エネルギーのすべてを他のエネルギーに変換することはできない。したがって、熱エネルギーは低品質のエネルギーとも呼ばれる。
エントロピーを完全な熱力学関数として用いる場合の系の平衡状態を表す変数は内部エネルギーと体積などの示量性変数である。しかし、温度は測定が容易なため、系の平衡状態を表す変数として温度を選ぶ場合がある。
閉鎖系で物質量の変化を考えない場合に、温度 T と体積 V の関数としてのエントロピー S (T ,V )T による偏微分は
(
∂
S
∂
T
)
V
=
1
T
(
∂
U
∂
T
)
V
=
C
V
(
T
,
V
)
T
{\displaystyle \left({\frac {\partial S}{\partial T}}\right)_{V}={\frac {1}{T}}\left({\frac {\partial U}{\partial T}}\right)_{V}={\frac {C_{V}(T,V)}{T}}}
で与えられる。ここで CV 定積熱容量 である。
また、エントロピー S (T ,V )V による偏微分はMaxwellの関係式より
(
∂
S
∂
V
)
T
=
(
∂
p
∂
T
)
V
{\displaystyle \left({\frac {\partial S}{\partial V}}\right)_{T}=\left({\frac {\partial p}{\partial T}}\right)_{V}}
で与えられる。これは熱膨張係数 α と等温圧縮率 κT で表せば
(
∂
S
∂
V
)
T
=
α
κ
T
{\displaystyle \left({\frac {\partial S}{\partial V}}\right)_{T}={\frac {\alpha }{\kappa _{T}}}}
となる。
従って、T -V
d
S
=
C
V
T
d
T
+
(
∂
p
∂
T
)
V
d
V
=
C
V
T
d
T
+
α
κ
T
d
V
{\displaystyle {\begin{aligned}dS&={\frac {C_{V}}{T}}\,dT+\left({\frac {\partial p}{\partial T}}\right)_{V}dV\\&={\frac {C_{V}}{T}}\,dT+{\frac {\alpha }{\kappa _{T}}}\,dV\\\end{aligned}}}
となる。
さらに体積に変えて圧力 p を変数に用いれば、体積 V (T ,p )
d
V
=
V
(
α
d
T
−
κ
T
d
p
)
{\displaystyle dV=V(\alpha \,dT-\kappa _{T}dp)}
であることを用いれば、T -p
d
S
=
C
p
T
d
T
−
V
α
d
p
{\displaystyle dS={\frac {C_{p}}{T}}\,dT-V\alpha \,dp}
となる。
低圧領域において実在気体 の状態方程式をビリアル展開
V
m
(
T
,
p
)
=
R
T
p
+
B
V
(
T
)
+
O
(
p
1
)
{\displaystyle V_{\text{m}}(T,p)={\frac {RT}{p}}+B_{V}(T)+O(p^{1})}
の形で書くと、モルエントロピー S m マクスウェルの関係式 より
(
∂
S
m
∂
p
)
T
=
−
(
∂
V
m
∂
T
)
p
=
−
R
p
−
d
B
V
d
T
+
O
(
p
1
)
{\displaystyle \left({\frac {\partial S_{\text{m}}}{\partial p}}\right)_{T}=-\left({\frac {\partial V_{\text{m}}}{\partial T}}\right)_{p}=-{\frac {R}{p}}-{\frac {dB_{V}}{dT}}+O(p^{1})}
となる。従って、低圧領域においてモルエントロピーは
S
m
(
T
,
p
)
=
S
m
∘
(
T
)
−
R
ln
p
p
∘
−
p
d
B
V
d
T
+
O
(
p
2
)
{\displaystyle S_{\text{m}}(T,p)=S_{\text{m}}^{\circ }(T)-R\ln {\frac {p}{p^{\circ }}}-p\,{\frac {dB_{V}}{dT}}+O(p^{2})}
で表される。ここで
S
m
∘
(
T
)
=
lim
p
→
0
{
S
m
(
T
,
p
)
+
R
ln
p
p
∘
}
{\displaystyle S_{\text{m}}^{\circ }(T)=\lim _{p\to 0}\left\{S_{\text{m}}(T,p)+R\ln {\frac {p}{p^{\circ }}}\right\}}
で定義される S °m (T )T における標準モルエントロピー であり、この実在気体が理想気体の状態方程式に従うと仮定した時の、圧力 p °におけるモルエントロピーに相当する。
^ それに対し、(清水明 2021a )は第0法則を要請していないが、代わりに平衡状態にある系の部分系も平衡状態にあるという趣旨の要請をしている。
^ 外場や外場以外が原因となる不均一性は許容する。例えば固相と液相が共存するなど。
^ 「完全な壁」という名称は(清水明 2021a , pp. 28–29)によるが、同書の同ページによると必ずしも一般的な名称ではない。
^ ここでは(Lieb & Yngvason1999 , p. 14)に従い系とその状態空間を同一の記号で書いたが(Higa 2010 , p. 4)のように系Γ の状態空間を
S
t
(
Γ
)
{\displaystyle \mathrm {St} (\Gamma )}
^ 磁場がかかっていない場合は全磁化は定数なので自然な変数に入れなくても問題は生じない。
^ 相が複数ある場合は、各相ごとにこれらの物理量を並べたもので記述
^ 「部分集合」なのは上述したU 、V 、N がいずれも正の値しか取れないため。また後述する内部束縛があれば、さらに小さな部分集合となる。
^
上記の通り、
Γ
1
×
Γ
2
{\displaystyle \Gamma _{1}\times \Gamma _{2}}
C
{\displaystyle C}
C
′
{\displaystyle C'}
Λ
{\displaystyle \Lambda }
Γ
1
×
Γ
2
{\displaystyle \Gamma _{1}\times \Gamma _{2}}
Λ
{\displaystyle \Lambda }
清水明 2021a , p. 66-67)では、そのような元を局所平衡状態 (英 : local equilibrium state )と呼んで通常の平衡状態と区別している。
「局所平衡状態」と呼ぶのは、左側の系
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
^ ここで挙げた「過程」の定義は(金川哲也 2021 , p. 30)を参考にしたが、「過程」(英 : process )、「操作」(英 : operation )、「変化」(英 : change )といった単語の関係性は書籍によって異なる。例えば(金川哲也 2021 , p. 30)は「過程」と「変化」を使い分けているが、「書物によっては同義とみなす」としている。また(田崎晴明 2000 , p. 36)では他の書籍では「準静的過程」と呼ぶところを「準静的操作」と呼んでいる。
^ ここでは(清水明 2021a , pp. 126)、(田崎晴明 2000 , pp. 36)の定義を採用したが、書籍によって定義が異なっており、(清水明 2021a , pp. 150)によれば可逆過程の事を準静的過程と呼んでいる書籍もある。
^ 実用的には有効数字の範囲内で誤差が起きない程度にゆっくり動かせば良く、そのために系が平衡に達する時間に比べて十分ゆっくり動かす。
^ たとえば仕事と熱量はそれぞれ
−
∫
γ
P
d
V
{\displaystyle \textstyle -\int _{\gamma }P\mathrm {d} V}
∫
γ
T
d
S
{\displaystyle \textstyle \int _{\gamma }T\mathrm {d} S}
^ 教科書によっては「
d
−
−
B
{\displaystyle d\!\!\!{}^{-\!\!-}B}
δ
B
{\displaystyle \delta B}
^ 前述 のようにこのように定式化できるのは準静的過程の場合のみ。^ 定義に関する注釈は以下の通り:
記法は(Lieb & Yngvason1999 , p. 18)に倣った。
ここでは(清水明 2021a , pp. 27)と(Lieb & Yngvason1999 , p. 18)にしたがって「任意の系」および「任意の平衡状態」としたが、(田崎晴明 2000 , p. 24)では平衡状態に関して明確な記述はない。
(清水明 2021a , pp. 27)ではより一般に3つ以上の分割も考えているが、2つの分割に対する定義から3つ以上の分割も認める定義が容易に導けるので、定義は同値である。
2つの系
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
Γ
0
{\displaystyle \Gamma _{0}}
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
(田崎晴明 2000 , p. 24)は
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
(Lieb & Yngvason1999 , p. 18)では壁を取り去らないが、完全な壁とは限らない任意の壁を想定している(ので物質や熱などすべてを通す壁もあり得る)ため、(田崎晴明 2000 , p. 24)よりも一般的な状況を想定している。
(清水明 2021a , pp. 27)では逆に
Γ
0
{\displaystyle \Gamma _{0}}
Γ
0
{\displaystyle \Gamma _{0}}
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
^ 「tA 」という記号だが、これはベクトルとしてt 倍する、という意味ではない。「tA 」がベクトルとしてのt 倍と一致するか否かは、状態空間の座標系により、TVN 表示している場合は
A
=
(
T
,
V
,
N
,
…
)
{\displaystyle A=(T,V,N,\ldots )}
t
A
=
(
T
,
t
V
,
t
N
,
…
)
{\displaystyle tA=(T,tV,tN,\ldots )}
t 倍とは一致しない。これは温度T が後述する示強変数だからである。UVN 表示やSVN 表示のように全ての変数が示量変数である座標系では「tA 」はベクトルとしてのt 倍と一致する。
田崎晴明 2000 , p. 32)では示強変数と資料変数の違いを明確化するため、
(
T
;
V
,
N
,
…
)
{\displaystyle (T;V,N,\ldots )}
^
(清水明 2021a , pp. 27)における示量変数の定義はここであげたものとは異なり、Γ の各(マクロに見て均一な)部分系でD の値がその部分系の体積V に比例する事をもって示量変数の定義としている。(清水明 2021a , pp. 27)の意味で示量変数であれば
D
(
t
A
)
:
D
(
A
)
=
V
(
t
A
)
:
V
(
A
)
{\displaystyle D(tA):D(A)=V(tA):V(A)}
V
(
t
A
)
=
t
V
(
A
)
{\displaystyle V(tA)=tV(A)}
D が本項の意味での示量変数の定義
D
(
t
A
)
=
t
D
(
A
)
{\displaystyle D(tA)=tD(A)}
^ 実際、
B
=
1
m
A
{\displaystyle B={1 \over m}A}
B をn 個並べた状態
n
B
{\displaystyle nB}
D の相加性から
D
(
n
B
)
=
D
(
(
n
−
1
)
B
,
B
)
=
D
(
(
n
−
1
)
B
)
+
D
(
B
)
=
⋯
=
n
D
(
B
)
{\displaystyle D(nB)=D((n-1)B,B)=D((n-1)B)+D(B)=\cdots =nD(B)}
D
(
A
)
=
D
(
m
⋅
1
m
A
)
=
m
D
(
1
m
A
)
{\displaystyle \textstyle D(A)=D(m\cdot {1 \over m}A)=mD({1 \over m}A)}
D
(
1
m
A
)
=
1
m
D
(
A
)
{\displaystyle \textstyle D({1 \over m}A)={1 \over m}D(A)}
D
(
n
m
A
)
=
n
D
(
1
m
A
)
=
n
m
D
(
A
)
{\displaystyle \textstyle D({n \over m}A)=nD({1 \over m}A)={n \over m}D(A)}
Lieb & Yngvason1999 )ではD がエントロピーS の場合に対し、S の連続性を仮定せず、むしろ示量性からS の連続性を示している。
^ (清水明 2021a , pp. 28)では「どの部分系においても体積に依らず同じ値を持つ」状態量を示強変数と呼んでいる。この意味での示強変数が本項の意味での示強変数を含意する事の証明は、示量変数の場合と同様なので省略する。
^ 外場がある場合は
Δ
U
{\displaystyle \Delta U}
Δ
U
=
0
{\displaystyle \Delta U=0}
E 全体位置 E 内部 E 全体位置 +E 内部 E 内部 E 内部 ΔE 内部 は
Δ
U
=
0
{\displaystyle \Delta U=0}
清水明 2021a )では「内部エネルギー」という用語を用いるのを避け、E 全体位置 +E 内部
U
{\displaystyle U}
E 全体位置 E 全体位置 E 内部
U
{\displaystyle U}
U
{\displaystyle U}
^ (清水明 2021a , pp. 117–120)では力学的仕事に限定しているが、(清水明 2021a , pp. 151–152)で化学的仕事をも含めた形に話を拡張しているので、ここでは単に「仕事」とした。
^ 熱力学の第一法則の解釈は何を議論のスタートラインと置くかで異なり、ここでは(清水明 2021a , pp. 117–120)や(キャレン 1998 , p. 26)と同じく第一法則はU とW から熱Q を定義する定義式であるという解釈を取った。(なお、(キャレン 1998 , p. 26)は第一法則を微分形で与えているので準静的過程の場合のみ)。
田崎晴明 2000 , p. 59,71)は(「断熱」という言葉を無定義に使ったうえで)「断熱過程で系が外部に対して行う仕事量は、仕事の具体的な方法に依存しない」という趣旨の事を「第一法則」と呼び、これがエネルギー保存則であるという解釈をしたうえで、断熱とは限らない状況下で
Q
=
Δ
U
−
W
{\displaystyle Q=\Delta U-W}
田崎晴明 2000 , p. 65-66)によれば、本節で述べたような第一法則に関する議論ではマクロな系を構成するミクロな粒子がニュートン力学(ないし量子力学)の基礎方程式に従う事を前提としているが、歴史的にはむしろ逆で、第一法則が成立している事により、ミクロな粒子がこれらの基礎方程式に従うという(直接的には検証できない)信念が得られたのだとしている。
^ 符号の規約は書籍によって異なり、我々は(キャレン 1998 , p. 25)に従ったが(金川哲也 2021 , p. 35-36)では仕事の符号に関して我々と反対の規約を採用している。
^ (キャレン 1998 , p. 26)は準静的過程である事を強調してこの場合の熱を準静的熱 と呼んでいる。
^ 物理的な系の熱力学的な状態に実数を対応させる関数として定式化される物理量の事。
^ ここでは(田崎晴明 2000 , pp. 101–102)に従って単に「断熱」としたが、暗黙の前提として「断物」も仮定しているものと思われる。実際エントロピー原理から従うエントロピー増大則に対し、(清水明 2021a , p. 177)では断物も仮定している。以下、特に断りがなければ、本節の記述は断物も仮定しているものとする。
^ a b 厳密にはエントロピー原理が成り立つには下記の仮定(Comparison Hypothesis, 直訳:比較仮定)を置く必要がある,:任意の平衡状態A 、B に対し、
A
≺
B
{\displaystyle A\prec B}
B
≺
A
{\displaystyle B\prec A}
A
≺
B
{\displaystyle A\prec B}
A からB に断熱的に遷移可能である事を意味する。
^ a b 「エントロピー原理」という名称は(田崎晴明 2000 , pp. 101–102)により、(Lieb & Yngvason1999 , p. 18)はこの原理の事をエントロピーの単調性 (英 : monotonisity )と呼んでいる。
^ (田崎晴明 2000 , p. 95)では暗黙の前提として、内部制約が課せられていない状態空間を考えている。実際例えば
Γ
⊂
R
n
{\displaystyle \Gamma \subset \mathbb {R} ^{n}}
Γ
=
Γ
1
⊔
Γ
2
{\displaystyle \Gamma =\Gamma _{1}\sqcup \Gamma _{2}}
Γ
1
{\displaystyle \Gamma _{1}}
Γ
2
{\displaystyle \Gamma _{2}}
A
∈
Γ
1
{\displaystyle A\in \Gamma _{1}}
B
∈
Γ
2
{\displaystyle B\in \Gamma _{2}}
A からB に準静的な断熱過程で遷移できる」は成立しない。
^ 前節同様、暗に断物も仮定している。実際(清水明 2021a , p. 177)には「断熱かつ断物」と明記されている。
^ 後述するようにエントロピーは内部エネルギーに対して単調増加であるので、系の内部エネルギーを外部から吸熱して減らせばエントロピーが減る。
^ わかりやすさのために内部束縛
C
1
,
C
2
,
…
,
C
m
{\displaystyle C_{1},C_{2},\ldots ,C_{m}}
C
1
,
C
2
,
…
,
C
m
{\displaystyle C_{1},C_{2},\ldots ,C_{m}}
max
{
S
(
A
)
|
A
∈
Γ
}
{\displaystyle \max\{S(A)|A\in \Gamma \}}
^
上記の性質において関数
∑
i
S
(
A
i
)
{\displaystyle \textstyle \sum _{i}S(A_{i})}
Γ
1
×
⋯
×
Γ
k
{\displaystyle \Gamma _{1}\times \cdots \times \Gamma _{k}}
Λ
=
{
(
A
1
,
…
,
A
k
)
∈
Γ
1
×
⋯
×
Γ
k
∣
(
A
1
,
…
,
A
k
)
{\displaystyle \Lambda =\{(A_{1},\ldots ,A_{k})\in \Gamma _{1}\times \cdots \times \Gamma _{k}\mid (A_{1},\ldots ,A_{k})}
C
1
,
C
2
,
…
,
C
m
{\displaystyle C_{1},C_{2},\ldots ,C_{m}}
}
{\displaystyle \}}
S
(
A
1
,
…
,
A
k
)
=
∑
i
S
(
A
i
)
{\displaystyle S(A_{1},\ldots ,A_{k})=\textstyle \sum _{i}S(A_{i})}
Λ
{\displaystyle \Lambda }
制限写像
S
|
Λ
:
Λ
→
R
{\displaystyle S|_{\Lambda }~:~\Lambda \to \mathbb {R} }
清水明 2021a , p. 66-67)では
Λ
{\displaystyle \Lambda }
S
(
⋅
,
⋅
)
{\displaystyle S(\cdot ,\cdot )}
局所平衡エントロピー と呼んで通常のエントロピーと区別している。
^ [ 注 27] ^ (清水明 2021a , pp. 47–48)のみ「示量変数」ではなく「相加変数」となっているが熱力学では示量変数と相加変数を区別する必要がないので、ここでは「示量変数」とした。
^ 磁場がかかっていない場合は全磁化は定数なので自然な変数に入れなくても問題は生じない。
^ 微分可能であり、かつ微分が連続であるという事。「
C
1
{\displaystyle C^{1}}
^ 厳密に言うと、状態空間をΓ とするとき、2つの平衡状態
A
,
B
∈
Γ
⊂
R
n
{\displaystyle A,B\in \Gamma \subset \mathbb {R} ^{n}}
t
A
+
(
1
−
t
)
B
{\displaystyle tA+(1-t)B}
Γ
⊂
R
n
{\displaystyle \Gamma \subset \mathbb {R} ^{n}}
Γ に属しているという仮定(すなわちΓ が
R
n
{\displaystyle \mathbb {R} ^{n}}
凸部分集合 であるという仮定)を状態空間においている。
{
(
x
1
,
…
,
x
n
)
∈
R
n
∣
∀
i
:
x
i
>
0
}
{\displaystyle \{(x_{1},\ldots ,x_{n})\in \mathbb {R} ^{n}\mid \forall i~:~x_{i}>0\}}
^ 壁を外したときに
t
A
1
+
(
1
−
t
)
A
2
{\displaystyle tA_{1}+(1-t)A_{2}}
t
T
1
+
(
1
−
t
)
T
2
{\displaystyle tT_{1}+(1-t)T_{2}}
^
S
(
U
,
V
)
{\displaystyle S(U,V)}
U
=
sin
V
{\displaystyle U=\sin V}
f
(
U
)
=
S
(
U
,
sin
U
)
{\displaystyle f(U)=S(U,\sin U)}
^ ここで記号
(
∂
A
∂
B
)
C
,
D
{\displaystyle \left({\partial A \over \partial B}\right)_{C,D}}
A
{\displaystyle A}
A
=
A
(
B
,
C
,
D
)
{\displaystyle A=A(B,C,D)}
(
B
,
C
,
D
)
{\displaystyle (B,C,D)}
C
{\displaystyle C}
D
{\displaystyle D}
B
{\displaystyle B}
A
{\displaystyle A}
(
B
,
C
,
D
)
{\displaystyle (B,C,D)}
^
U
{\displaystyle U}
S
{\displaystyle S}
F
{\displaystyle F}
H
α
=
∂
F
∂
M
α
{\displaystyle H_{\alpha }={\partial F \over \partial M_{\alpha }}}
^ より一般に
S
=
S
(
U
,
X
1
,
X
2
,
…
)
{\displaystyle S=S(U,X_{1},X_{2},\ldots )}
∫
∂
U
∂
X
i
d
X
i
{\displaystyle \int {\tfrac {\partial U}{\partial X_{i}}}dX_{i}}
d
′
Q
=
T
d
S
{\displaystyle \mathrm {d} 'Q=T\mathrm {d} S}
^ 記号「
S
(
A
|
B
)
{\displaystyle S(A|B)}
田崎晴明 2000 , pp. 114)によった。(Lieb & Yngvason1999 , p. 18)では「
S
(
A
,
B
)
{\displaystyle S(A,B)}
^ 示量性は任意の実数
t
>
0
{\displaystyle t>0}
S
(
t
A
)
=
t
S
(
A
)
{\displaystyle S(tA)=tS(A)}
S
(
A
,
A
)
=
2
S
(
A
)
{\displaystyle S(A,A)=2S(A)}
有理数
t
>
0
{\displaystyle t>0}
S
(
t
A
)
=
t
S
(
A
)
{\displaystyle S(tA)=tS(A)}
S は連続だと仮定していないので有理数ではない実数に対して
S
(
t
A
)
=
t
S
(
A
)
{\displaystyle S(tA)=tS(A)}
Lieb & Yngvason1999 )では示量性からS の連続性を示している。
^ 歪対称性を満たさないので正確には前順序 (英語版 )
^ カルノーの定理においては一般には熱効率の上限は η max = f (T 1 , T 2 )熱力学温度 (絶対温度 )T を定義する。たとえば、セルシウス度 やファーレンハイト度 を使った場合には、熱効率の式はやや複雑な形になる。
^ d' は状態量でない量の微小量ないし微小変化量を表す。文献によってしばしば同様の意味でδ が用いられる。
論文 書籍